
In these three stories, we want to show how different conditions in the Solar System require unique technical solutions. On an asteroid, ultra-low gravity forces the use of bouncing robots; on the Moon, wheeled rovers that can survive extreme temperature extremes; and on Mars, heavy vehicles with radioisotope power sources and full onboard laboratories. Each story illustrates how engineers adapt the design, power supply, and scientific instruments to the specific environment, proving that there is no one-size-fits-all rover for all celestial bodies.
Jumping hoppers on the Ryugu asteroid
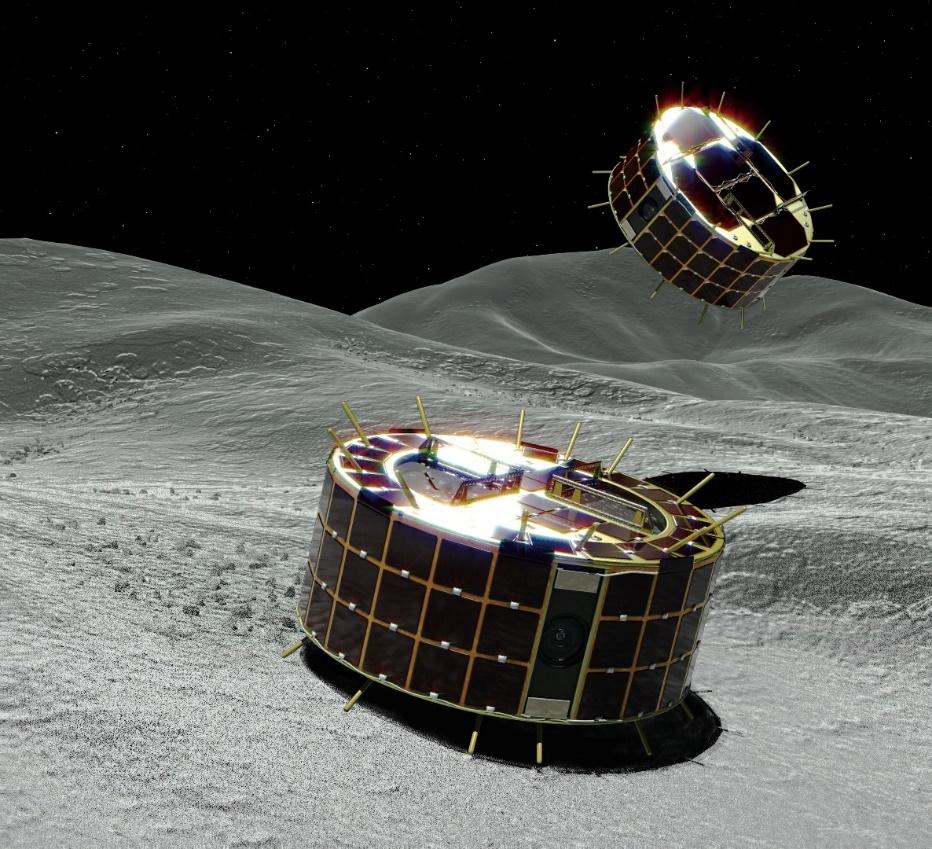
My name is MINERVA-II, and I am one of the mini-rovers (or hoppers) of the Hayabusa2 mission. My mass is about 1 kg, and my dimensions are about 18 x 7 cm. Together with the MASCOT landing module, we were sent by the space agencies JAXA (Japan) and DLR (Germany) to the asteroid Ryugu to study this small celestial body directly on its surface for the first time. I want to share my story – an account of how I got to Ryugu on September 21, 2018, how I moved on its surface, and what data I collected.
Birth and preparation for flight
When I was still in the laboratories on Earth, the designers tried to make me as compact and light as possible. Wheels were simply unsuitable for traveling on a tiny asteroid’s surface – gravity is too weak there. Instead, I was fitted with special flywheels (technically, they are called “torque mechanisms” or magnetic torquers). When they spin up, my body slightly shifts its center of gravity, and I jump.
I have it on board:
- Camera for panoramic shots.
- Thermosensor (radiometer) for temperature measurement.
- Magnetometer for finding magnetic minerals.
- Infrared spectrometer for surface layer composition analysis.
My colleague in the MASCOT (Mobile Asteroid Surface Scout) unit has a similar set of instruments, including MASCam cameras, MARA radiometer, MASMag magnetometer, and MicrOmega spectrometer. It also has a special system for changing orientation on the surface.
To support all these electronics, we were provided with batteries. MASCOT had a battery (Li-ion) with a life of about 17 hours of active operation (enough to run a series of important experiments). I had more compact batteries and solar panels that allowed me to recharge if I managed to be on the sunny side of the asteroid.
Getting to Ryugu
We were both attached to the Hayabusa2 spacecraft in special containers: we were sort of “bolted” to the probe before descent so that we would not get lost on the way. So we traveled together millions of kilometers through the solar system, heading for our destination – the asteroid Ryugu. The flight lasted several years. Controls were sent from Earth with a delay of a few minutes, and sometimes even longer, depending on the position of the planets.
Landing: a key point
After arriving at Ryugu, Hayabusa2 began a cautious approach to it, literally “hovering” at a low altitude above the surface. The asteroid’s gravity is so low that the slightest sudden movement could send it flying back into space. So the probe reduced its speed as much as possible and then gave me the command to undock.
- Separation. I felt a slight jolt – and found myself in free fall.
- Landing (more precisely, “moon landing” on an asteroid). Touched regolith – so-called loose surface rock consisting of dust, debris, and small stones.
- Hook on. Unlike the heavy Mars rovers, we did not have massive landing gear and wheels. But my design was designed not to bounce, but only to spring slightly.
MASCOT landed separately, a little later, with its “bouncing and flipping” system to lie on the surface in the desired orientation. It (like me) had no wheels, and movement on the surface was accomplished by short jumps.
Jumping on the surface
After planting, I began my basic work:
- I turned on the flywheels. Their unwinding shifted my center of gravity, and I made a neat jump a few meters along the surface.
- Each new “stopping point”. Turned up at a different point, took a series of pictures, measured the temperature of the regolith, and checked for magnetic anomalies. I also ran an infrared spectrometer to see what minerals make up the surface of Ryugu.
- Maximum caution. If you gave too strong an impulse, you could fly off into space because of the weak gravity. Therefore, all my “hops” were calculated in advance and were very gentle.

MASCOT similarly did things, although it had its orientation system and a disposable battery without recharging. Its task was to perform the entire set of measurements in 17 hours until the battery ran out.
Data transmission and communication
Neither of us had powerful antennas to communicate directly with Earth. All information about what we saw and measured on Ryugu came through Hayabusa2. When the spacecraft “hovered” not far above the surface or passed along the trajectory near me, I “dropped” photos, telemetry, and results of spectral analysis. Hayabusa2 then relayed this data to the control centers on Earth.
Since we had little time, communications had to wait “on schedule”: the mother probe was not always above me, and any command from Earth took time to reach the asteroid.
What I have discovered
In my short but productive mission, I, along with my partner, managed to:
- Conduct a visual survey

- Measure the temperature of the regolith and understand how quickly it heats up and cools down.
The measurements showed that the surface of the asteroid heats up rather quickly to values of about -50 – +30 °C, and in the shade and “at night” the temperature drops below -100 °C. This indicates low thermal conductivity (or “thermal inertia”), which is characteristic of the loose, “porous” structure of the regolith.
- To look for traces of magnetic minerals
The measurements do not reveal strong local or global magnetization; that is, no pronounced magnetic minerals (capable of producing a noticeable field) were found on Ryugu.
- Analyze the mineral composition
The spectral analysis confirmed that Ryugu belongs to the class of carbonaceous (C-type) asteroids: the surface contains carbon-rich and probably hydrated minerals. Some evidence indicates the presence of organic and water-related compounds, supporting the theory that such asteroids may have been sources of water and organics for the young Earth.
These data have given scientists unique information about how small bodies in the solar system formed and how the substances on their surfaces are related to Earth’s history.
The finale of my adventure
For me, the story ended when the energy reserves in the batteries ran out and there was little light for my solar panels. MASCOT, too, had successfully completed its 17-hour “working day” – 17 hours, collecting invaluable data. We will remain on Ryugu forever, like tiny space explorers who, despite their modest size, have made huge contributions to science. Our adventure showed that even the smallest and lightest vehicles can operate in such extreme conditions and unlock the mysteries of distant asteroids.
________________________________________________________________________________________________________________
Pragyan Moon Adventure Chandrayaan-3
My name is Pragyan. My name means “wisdom” in Sanskrit, and I am the lunar rover of the Chandrayaan-3 mission developed by the Indian Space Research Organization (ISRO). Today I want to tell you about myself, how I arrived on the lunar surface on August 23, 2023, and my adventure that lasted until the very beginning of the lunar night in the first half of September 2023.

The journey to the Moon and the landing
I started my journey with the Vikram landing module. Unlike vehicles that can use parachutes for landing (for example, on Mars, where there is a thin atmosphere), we relied solely on jet engines. The Moon has almost no atmosphere, so if we did not turn on the braking engines, we would not have had a soft landing – we would have simply crashed into its surface.
Vikram slowed and maneuvered based on the data from the laser rangefinders and cameras: the onboard computer was guiding us to the flattest possible landing site so I could get off without the risk of tipping over. In essence, it was a fully automatic landing. My size of 91.7 × 75.0 × 39.7 cm and a mass that was about 26 kg should have given me a soft landing. When we finally touched down on the regolith (lunar dust and rocks), I was still not quite sure what lay ahead – I could only trust those who had created me on Earth.
The first minutes on the lunar soil
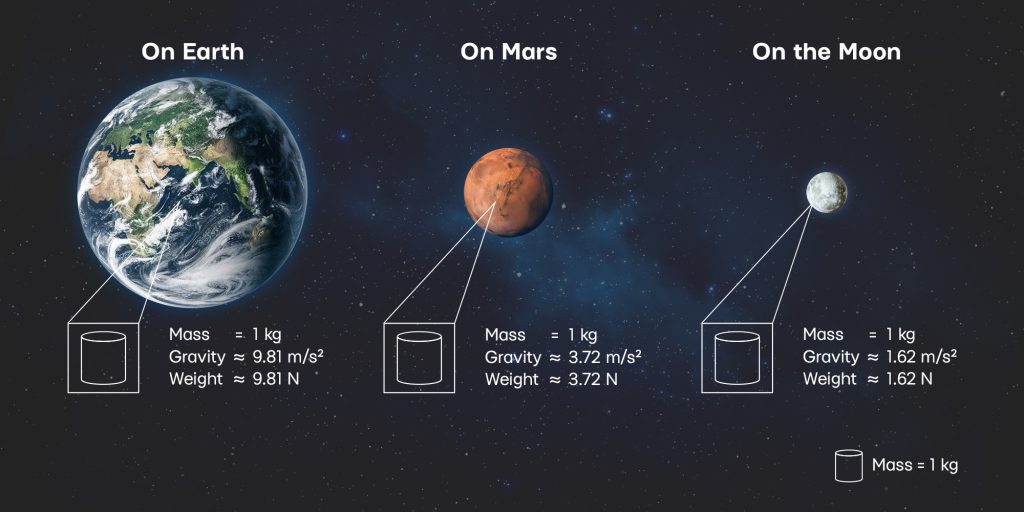
As I descended the special ramp, I felt a weak gravitational force – only 1/6 of the Earth’s gravity. I was relieved, but at the same time, I realized that the wheels, although they did not need to develop much power, would have to deal with the insidious lunar dust. The fine, abrasive regolith adheres to everything and can gradually wear down mechanisms. Fortunately, I have protection for moving parts: special seals and materials that are resistant to such dust.
My design and goals
I run on solar power: my panels charge my batteries during the lunar day (which lasts about 14 Earth days). But the lunar night also lasts about 14 days, and if I cannot survive it in sleep mode, the mission may be over.
Navigation and imaging cameras help my operators on Earth see where I am going and what objects are around us. Spectrometers to determine the composition of the lunar soil tell me what elements are in the rocks beneath my wheels. Thermal sensors (or radiometers) to measure surface temperature help scientists learn how quickly the lunar soil heats and cools and what temperature variations there might be. My chassis is designed for low mass in lunar gravity. The tread on the wheels helps to better grip the loose regolith and prevents heavy slippage. I move slowly and carefully without the risk of getting stuck or hurting myself.
About working and communicating with the Earth
The distance from the Moon to Earth is about 384,000 kilometers and the radio signal travels about 1-1.3 seconds. This allows me to receive commands and send back pictures and instrument readings in almost real-time.
Unlike rovers on the back side of the Moon (where a relay satellite is needed), I can communicate directly when Vikram and I are within Earth’s line of sight. Because of this, the speed and volume of information transmitted are quite high.
When night falls on the Moon, or when conditions are unfavorable, I can suspend work and fall asleep. Communications are also reduced – it is important to my developers to conserve energy so that I live as long as possible.
Temperatures can exceed +100 °C during the day (on the bright side of the Moon) and drop to -170 °C or even lower in the shade and at night. My mechanisms must be able to withstand such dramatic changes, and my electronics must work without fail.
Microscopic moon dust particles easily adhere to me due to electrification. Gradually, this can affect the mobility and efficiency of solar panels. But specially designed materials and coatings help to cope with the problem.
My mission
The main goal of Chandrayaan-3 is to prove that it is possible to land and travel safely on the Moon and to conduct several scientific studies. I, Pragyan, collect data on the soil structure and photograph craters and plains so that scientists on Earth can study the terrain features and select optimal locations for future missions.
I’m also helping to work on technologies that may one day be needed to build a permanent lunar base – including exploring the possibility of extracting useful resources (like water or minerals).
Conclusion
My creators have made a report on my journey. Though my stay on the Moon may be relatively short by Earth standards, but for a robotic mission, every day is a huge accomplishment. While on an asteroid a rover jumps around and lives for hours or days, and on Mars a rover can labor for years, the lunar environment is a special world that requires precise adaptation and careful decisions.
________________________________________________________________________________________________________________
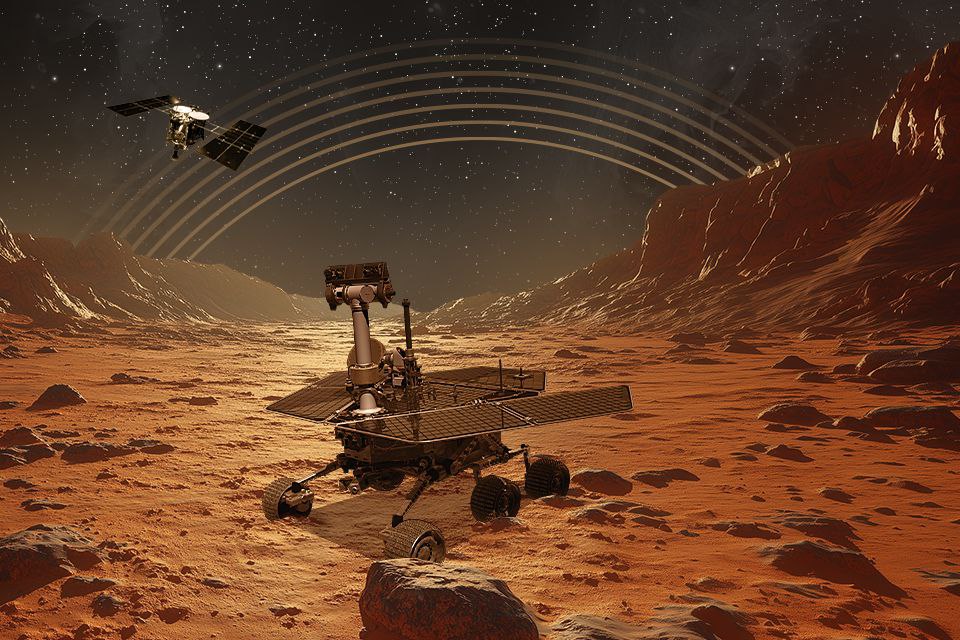
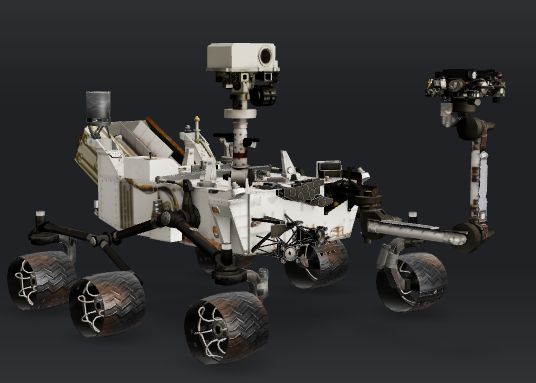
The Martian wanderings of Curiosity and its flying brother Ingenuity
My name is Curiosity. I am the rover NASA launched to the Red Planet back in 2012, and since then I have been wheeling across the Martian surface, traversing treacherous slopes and dunes, making geologic discoveries in search of signs that Mars was once inhabited. My story is a tale of an incredible journey and sophisticated technology that has allowed me to continue my work for years on end. I am larger than my counterparts from asteroids and the Moon: my mass is about 900 kg and my dimensions are about 3 × 2.7 × 2.2 meters. I have a little brother, a helicopter called Ingenuity, which appeared later, in February 2021. It is really small and weighs only 1.8 kg and is about 49 cm tall.
Sky Crane re-entry and landing
I arrived on Mars in a capsule that protected me as I entered the atmosphere. Although the Martian atmosphere is rarefied – only about 1% of Earth’s atmosphere – it still allowed me to use a heat shield and absorb most of my velocity. After the shield was dropped, a parachute specially designed for these conditions opened. However, it was not enough to make a soft landing, so the final stage of the landing was performed by the unique Sky Crane system:
- A special platform with jet engines hovered a couple of dozen meters above the surface.
- I was gently lowered on cables directly onto Martian soil.
- The cables were then shot off and the landing platform flew farther away to avoid damaging me on impact with the ground.
So, on August 6, 2012, I found myself at Gale Crater, my study area.
How I move and what I study
My six wheels are not just iron wheels. Each can be driven separately, and the sophisticated Rocker-Bogie suspension provides good stability over rocky terrain. Because the Martian surface is full of rock fragments and sometimes dunes, I move very carefully and not too fast – only a few tens of centimeters per second. I have to think every step of the way to avoid getting stuck in the treacherous sands, as happened to my predecessor Spirit.

My instruments: from cameras to laser
- Cameras
- Mastcam (panoramic camera): to look into the distance and take impressive pictures of Martian landscapes.
- Navcam and Hazcam: navigation and safety cameras to help you avoid obstacles.
- Spectrometers
- ChemCam (laser spectroscopy): I shoot a laser at rocks, vaporize a small section of rock, and the built-in spectrometer analyzes what elements it consists of.
- APXS (Alpha Particle X-Ray Spectrometer): I check the chemical composition of rocks by contacting the surface of the rock.
- Manipulator with drill
- I can drill the top layers of soil and rocks and then analyze the resulting powder in built-in mini-labs (SAM and CheMin). This is how scientists can find out what minerals are preserved in the depths.
- Climate sensors
- I have temperature sensors, pressure sensors, and even an ultraviolet radiation sensor. I transmit all this information back to Earth so people can understand what kind of “weather” Mars is breathing.
My mind and autonomy
Communication with Earth can take anywhere from 3 to 22 minutes one-way, depending on the position of the planets. Therefore, if I see a rock in my path, I cannot expect instant instructions from the operators. I can autonomously analyze my surroundings, choose a safe route, and avoid large boulders or potholes. After I have traveled a few meters, I send a report via one of the Martian orbiting satellites (Mars Reconnaissance Orbiter, Mars Odyssey, etc.) back to Earth.
My source of energy
Unlike some of my solar relatives (Spirit, Opportunity, Zhurong), which depend on the Sun and fear dust storms, I am equipped with a radioisotope generator (RTG). It produces direct current by converting the heat of plutonium-238 decay into electricity. This gives me independence from Martian weather and allows me to work even when night falls or dust storms obscure the light. Of course, I still have batteries that provide peaks of power consumption for wheel propulsion and laser launches.
The younger brother is an Ingenuity helicopter
Although we did not fly together on the same expedition, I look at the Ingenuity helicopter (which arrived with the Perseverance rover in 2021) as its little brother. It was the first vehicle to fly successfully in the rarefied Martian atmosphere. Engineers had long wondered whether it was even possible to take off where the pressure is 100 times lower than Earth’s. But Ingenuity proved: it is real!

- Size and mass. Compact lightweight apparatus that can rise several meters above the surface.
- The role of a scout. It provides an opportunity to look “around the corner”, choosing the safest path for the rover.
- Complexity of control. Like me, it cannot receive commands instantly – the signal delay from Earth does not allow the operator to “steer” the helicopter in real time. Everything is based on preloaded autonomous flight programs.
I watch it soar over the reddish sand with curiosity, and I remember how people once thought that flying to Mars was pure fantasy. Now, thanks to Ingenuity, we have the first aerial reconnaissance of the Red Planet.
Life and connection to the Earth
Each of my days on Mars is called a “sol” and lasts a little longer than an Earth day (24 hours and 39 minutes). I perform scientific tasks, take photos, drill rocks, and analyze them, and by evening (or when the orbital transponder flies overhead) I send data packets home. Scientists on Earth “parse” my photos, the result of the rock analysis, and the meteorological data. By the next morning, I receive new instructions: where to go, what to study, where to drill.
My mission
My main goal is to understand whether conditions favorable to life ever existed on Mars. I have examined ancient riverbeds, and lake-like sediments, and searched for organic molecules – and it is already clear that Mars once had liquid water and may have had a denser atmosphere. With each day, each centimeter I travel, I get closer to answering the question, “Was Mars ever inhabited?”
Looking to the future
My discoveries and the data I send back to Earth are part of a larger science program leading to humans setting foot on Mars one day. My younger brother Ingenuity is showing that we will be able to use flying vehicles to scout future landing sites and routes. And my colleague Perseverance is now collecting rock samples for possible future delivery to Earth.
We are all part of the same team working on the surface of the Red Planet, despite the millions of kilometers and harsh conditions. My name is Curiosity, and even though I have been here for years, my curiosity about this mysterious planet has never waned.
________________________________________________________________________________________________________________
Each rover is a highly specialized vehicle adapted to the unique conditions of its target environment. While asteroid hoppers only need a few hours to make the leap through microgravity and send valuable data, the lunar Pragyan spends weeks on Earth’s cold satellite, overcoming dust and extreme temperatures, and the Curiosity rover, equipped with a powerful RTG and a full-fledged “laboratory on wheels”, has been meticulously studying the rocks of Mars for years.
This is an example of how unique solutions are created for each space mission, and a universal rover suitable for an asteroid, the Moon, and Mars at the same time simply does not exist.
